SIMATIC山东淄博西门子PLC模块代理商







西门子V90伺服驱动器的基本定位功能(EPOS)可以实现点到点的负载定位控制,可以满足所有简单定位功能的工艺需要。
基本定位功能(EPOS)主要包括相对定位、**定位、回零、JOG点动、运行程序段等功能。驱动器在执行定位任务过程中会按照工艺参数,如:加、减速度给定、速度给定、目标位置给定等插补出实时的位置给定值,随后进行闭环的位置控制。在执行定位任务的过程中会遇到一些常见故障,本期为大家说一说与基本定位(EPOS)有关的常见报警F07450、F07451、
F07452的处理和分析方法。
1 静态监控和定位监控的基本原理
在进行故障分析之前,首先介绍一下定位完成和监控的原理。对于V90驱动器,一旦位置设定值不再改变(完成插补后),驱动器立即开始对位置实际值进行如下监控:
(1) 当轴的位置设定值进入到定位窗口并不再改变时,如果轴在静态监控时间(P2543)内还没有达到静态窗口(P2542),驱动器便输出故障F07450。对于已经到达静态窗口或者处于静止状态下的伺服轴,这个时候如果人为地推动伺服轴或者机械受到某种外力致使伺服轴移动,而导致实际位置超出静态窗口(P2542)并且在静态监控时间(P2543)内未回到静态监控窗口内,同样会引发静态监控故障F07450。
(2) 当轴的位置设定值进入到定位窗口后并不再改变时,在定位监控时间(P2545)内轴的位置实际值也需要进入到定位窗口(P2544),此时驱动器会给出已到达目标位置的信号。如果轴的实际位置在定位监控时间内还没有进入定位窗口,V90便输出故障F07451。
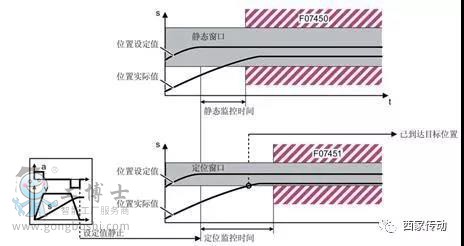
图1. 静态监控和定位监控
(3) 跟随误差是轴定位期间位置设定值和实际值之间的偏差,跟随误差过大时,超出P2546设置的公差范围,V90会输出故障F07452。

图2. 跟随误差监控
2 故障分析及解决办法
(1) 驱动器报F07450,F07451的解决方法
如果由于负载惯量过大导致定位过程震荡,可限制减速度以达到减小冲击的目的,方式是激活EPOS急动限制(P2575=1),并适当减小急动限制值(P2574)以实现平稳定位。
如果由于闭环特性偏软导致跟随性差,可以通过增大速度前馈系数P29111(*大可以设置为****)提高系统响应,并且可尝试提高动态系数进行一键自动优化或手动调整闭环参数实现较高的动态跟随性。
可适当增大监控窗口(F07450对应P2542, F07451对应P2544)或者增大监控时间(F07450对应P2543, F07451对应P2545)来避免此故障,如果将P2542(F07450)或者P2544(F07451)设置为0,系统会取消监控功能,故障就被屏蔽,不会进行监控。
(2) 驱动器报F07452的解决方法
简单通过V-ASSISTANT调试软件测试电机运行,测试运行过程中验证电缆(电机电缆、编码器)的正确连接以及机械是否存在卡顿问题。
监控电机实际转矩,评估实际转矩是否达到限幅或超过电机输出能力。
如果由于闭环特性偏软导致跟随性差,可以通过增大速度前馈系数提高系统响应,并且可尝试提高动态系数进行一键自动
优化或手动调整闭环参数实现较高的动态跟随性。
可适当增大跟随误差监控公差来避免此故障,如果将(P2546)设置为0,系统会取消跟随误差监控功能,故障就被屏蔽,不会进行监控。
结语:
通过以上几种常见定位故障的分析,我们能够很清楚地看到如果这些窗口范围设置的不合适、或者驱动器的特性优化得不理想、又或者机械系统本身就有问题,就很可能会出现这些报警信息。

联系方式
- 地址:上海跃韦科技集团有限公司
- 邮编:201400
- 电话:18674345958
- 经理:李经理
- 手机:18674345958
- 微信:yingsheng16816816888
- QQ:526554675
